8400 HighLine | Parameter setting & configuration
System bus "CAN on board"
Process data transfer
528 L Firmware ≤ 05.00 - DMS 4.2 EN - 02/2010
10.7.5 Monitoring of the RPDOs for data reception
Every RPDO1 ... RPDO4 has a parameterisable monitoring time in which the RPDO must
arrive. If the RPDO is not received within the monitoring time or with the configured sync,
the response parameterised for the respective RPDO is activated.
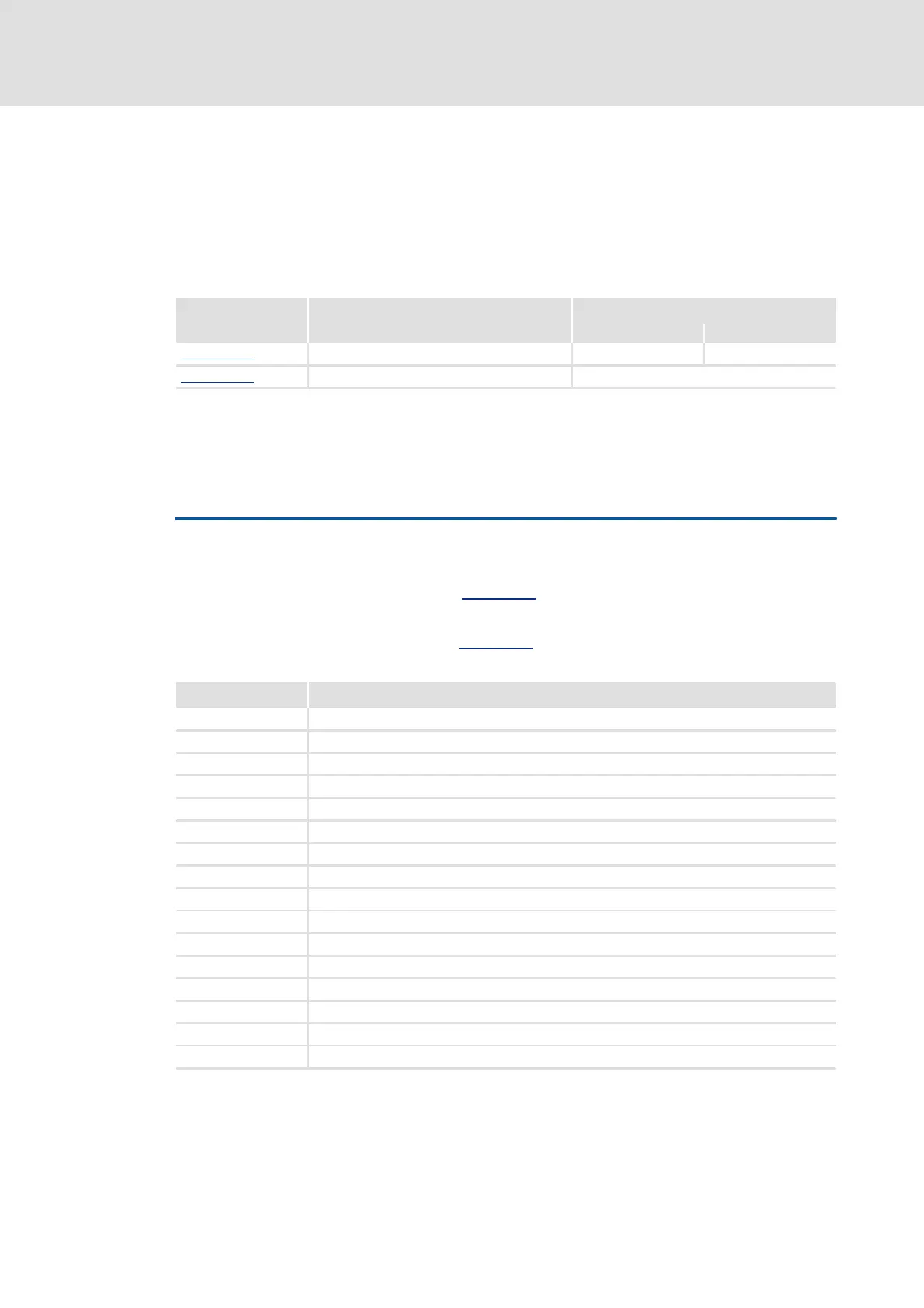
Short overview: Parameters for RPDO monitoring
10.7.6 Configuring exception handling of the CAN PDOs
This function extension is only available from version 04.00.00!
Exception handling for the CAN PDOs in the event of an error can be set via decoupling
configuration and decoupling values.
Bit coded selection is carried out in C00342/1
for the process data words read by the
bus, defining the events that will trigger decoupling.
Bit coded selection is carried out in C00342/2
for the process data words output by the
application, defining the events that will trigger decoupling.
Parameter Info Lenze setting
Value Unit
C00357/1...3 CAN1...3_IN monitoring time 3000 ms
C00593/1...3
Resp. to CAN1...3_IN monitoring No response
Bit Event
Bit 0 BusOff_MsgErr
Bit 1 Warning
Bit 2 NodeStopped
Bit 3 HeartBeatEvent
Bit 4 CAN1_In_Monitor.
Bit 5 CAN2_In_Monitor.
Bit 6 CAN3_In_Monitor.
Bit 7 Reserved
Bit 8 Reserved
Bit 9 Reserved
Bit 10 Reserved
Bit 11 Reserved
Bit 12 Reserved
Bit 13 Reserved
Bit 14 Trouble
Bit 15 Fault
efesotomasyon.com - Lenze
 Loading...
Loading...