8400 HighLine | Parameter setting & configuration
System bus "CAN on board"
Implemented CANopen objects
566 L Firmware ≤ 05.00 - DMS 4.2 EN - 02/2010
Subindex 2 - transmission type
Subindex 3 - inhibit time
The entered value multiplied by 0.1 gives the delay time in [ms]. Only integers will be
considered, i.e. fractional numbers will be rounded down to integers.
Example:
Entered value: 26
Calculated time = 26 x 0.1 [ms] = 2.6 [ms] delay time = 2 [ms}
Subindex 5 - event timer
For cyclic operation (transmission type 254), the cycle time for sending the process data
object on the CAN bus can be set under subindex 5:
The entered value corresponds to the time in [ms].
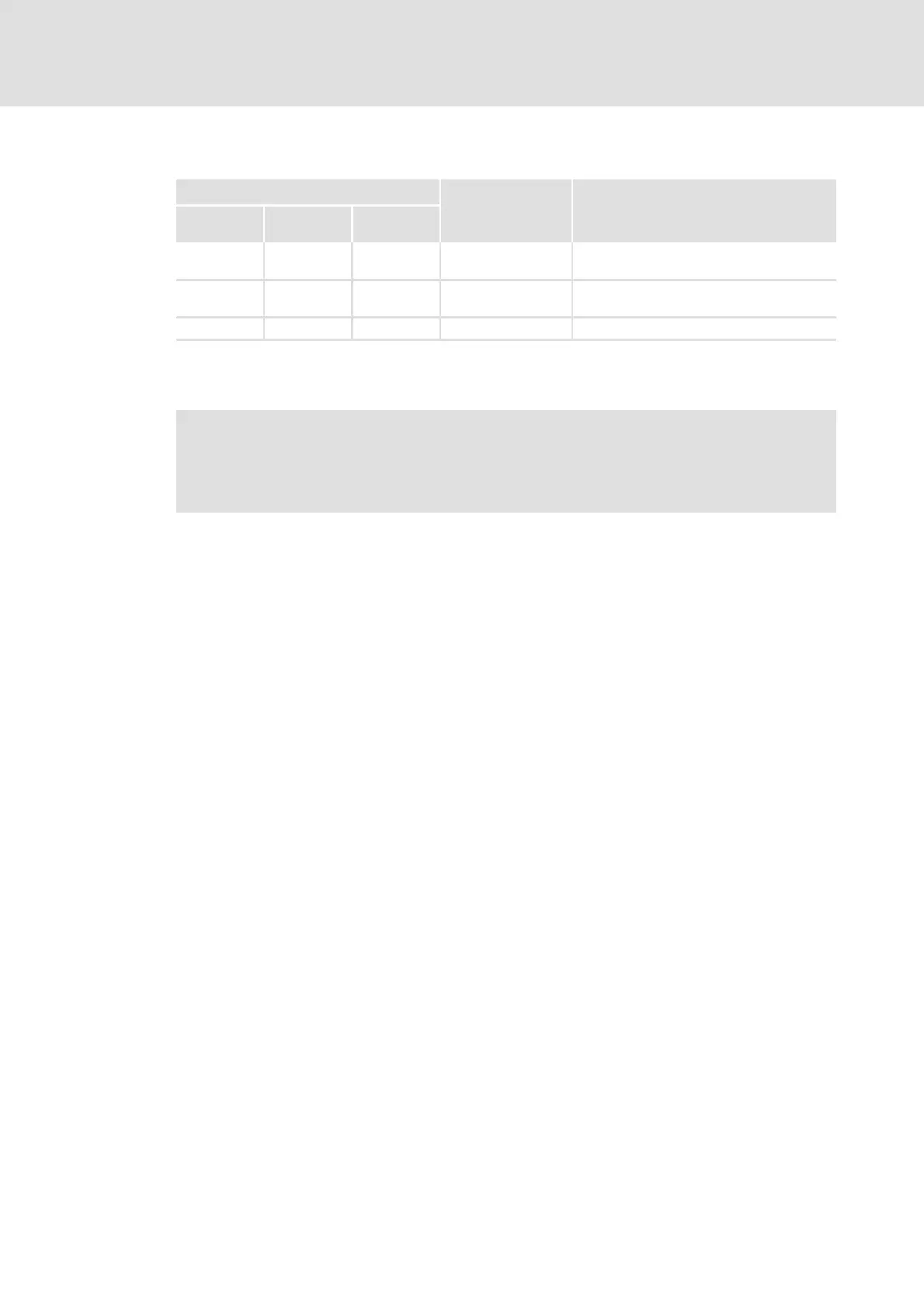
PDO transmission Transmission type Explanation
cyclic synchronous event-
controlled
zz n = 1 ... 240 When a value n is entered, this PDO will be
accepted with every nth SYNC.
z n = 252 On sync, the PDO is filled with new data, but
only sent on RTR.
z n = 254, 255 Event-controlled or cyclic
Note!
The delay time can only be changed when the PDO is not active (see subindex 1,
bit 31 = 1).
efesotomasyon.com - Lenze
 Loading...
Loading...