Chapter 5
Setup and Configuration
RUGGEDCOM ROX II
User Guide
682 Managing Priority to CoS Maps
Section 5.32.2
Managing Priority to CoS Maps
Assigning CoS to different IEEE 802.1p priority values in the frame is done by defining priority-to-CoS mapping
table entries.
The following sections describe how to configure and manage priority-to-CoS mapping:
• Section 5.32.2.1, “Viewing a List of Priorities”
• Section 5.32.2.2, “Adding a Priority”
• Section 5.32.2.3, “Deleting a Priority”
Section 5.32.2.1
Viewing a List of Priorities
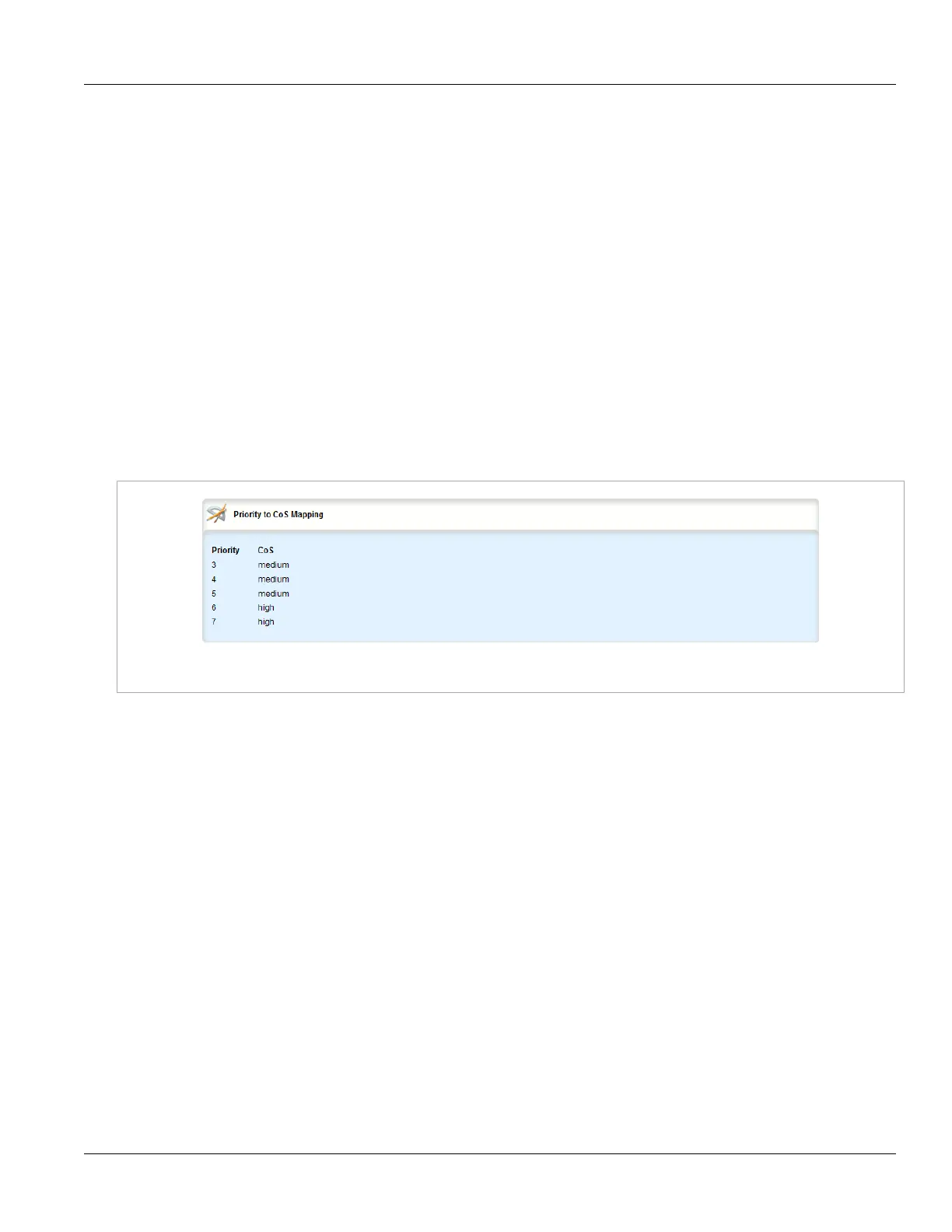
To view a list of priorites, navigate to switch » class-of-service » priority-to-cos. If priorities have been
configured, the Priority to CoS Mapping table appears.
Figure 799: Priority to CoS Mapping Table
If no priorities have been configured, add priorities as needed. For more information, refer to Section 5.32.2.2,
“Adding a Priority”.
Section 5.32.2.2
Adding a Priority
To add a priority, do the following:
1. Change the mode to Edit Private or Edit Exclusive.
2. Navigate to switch » class-of-service » priority-to-cos and click <Add priority-to-cos>. The Key Settings
form appears.

 Loading...
Loading...






