QFLG:UTO
QUPRD
32
QUTMR
32
QEPCTL:UTE
UTIME
VCLK3
UTOUT
QFLG:WTO
QWDPRD
16
QWDTMR
16
QEPCTL:WDE
QWDOG
RESET
VCLK3
/64
VCLK3
QCLK
WDTOUT
Basic Operation
www.ti.com
1976
SPNU563A–March 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Enhanced Quadrature Encoder Pulse (eQEP) Module
Parameter Relevant Register to Configure or Read the Information
T Unit Period Register (QUPRD)
ΔX Incremental Position = QPOSLAT(k) - QPOSLAT(K-1)
X Fixed unit position defined by sensor resolution and ZCAPCTL[UPPS] bits
ΔT Capture Period Latch (QCPRDLAT)
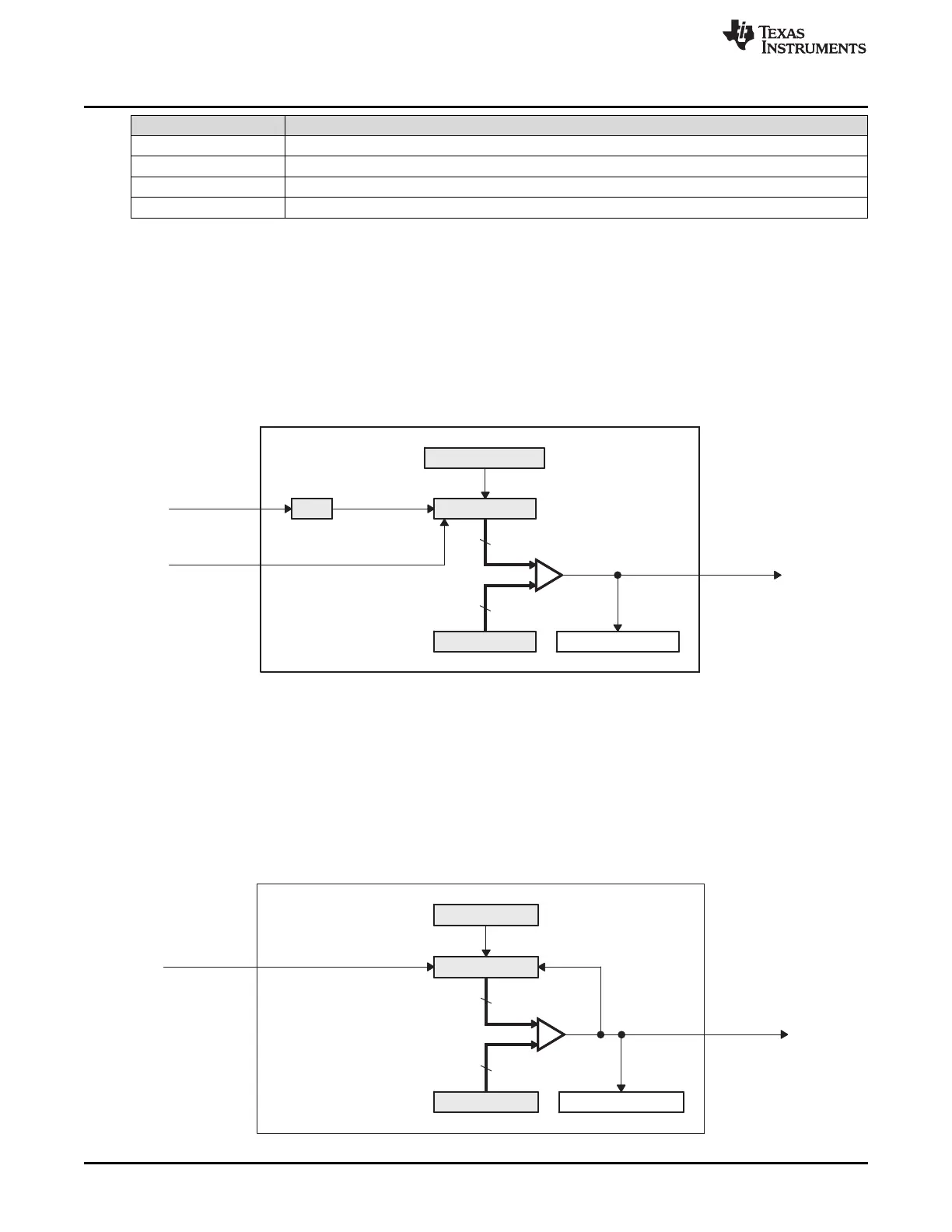
34.2.3 eQEP Watchdog
The eQEP peripheral contains a 16-bit watchdog timer that monitors the quadrature-clock to indicate
proper operation of the motion-control system. The eQEP watchdog timer is clocked from VCLK3/64 and
the quadrate clock event (pulse) resets the watchdog timer. If no quadrature-clock event is detected until a
period match (QWDPRD = QWDTMR), then the watchdog timer will time out and the watchdog interrupt
flag will be set (QFLG[WTO]). The time-out value is programmable through the watchdog period register
(QWDPRD).
Figure 34-18. eQEP Watchdog Timer
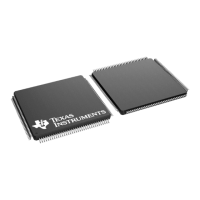
34.2.4 Unit Timer Base
The eQEP peripheral includes a 32-bit timer (QUTMR) that is clocked by VCLK3 to generate periodic
interrupts for velocity calculations. The unit time out interrupt is set (QFLG[UTO]) when the unit timer
(QUTMR) matches the unit period register (QUPRD).
The eQEP peripheral can be configured to latch the position counter, capture timer, and capture period
values on a unit time out event so that latched values are used for velocity calculation as described in
Section 34.2.2.4.
Figure 34-19. eQEP Unit Time Base

 Loading...
Loading...