T
0
0.25T
0
±0.1T
0
0.5T
0
±0.1T
0
T
0
±0.5T
0
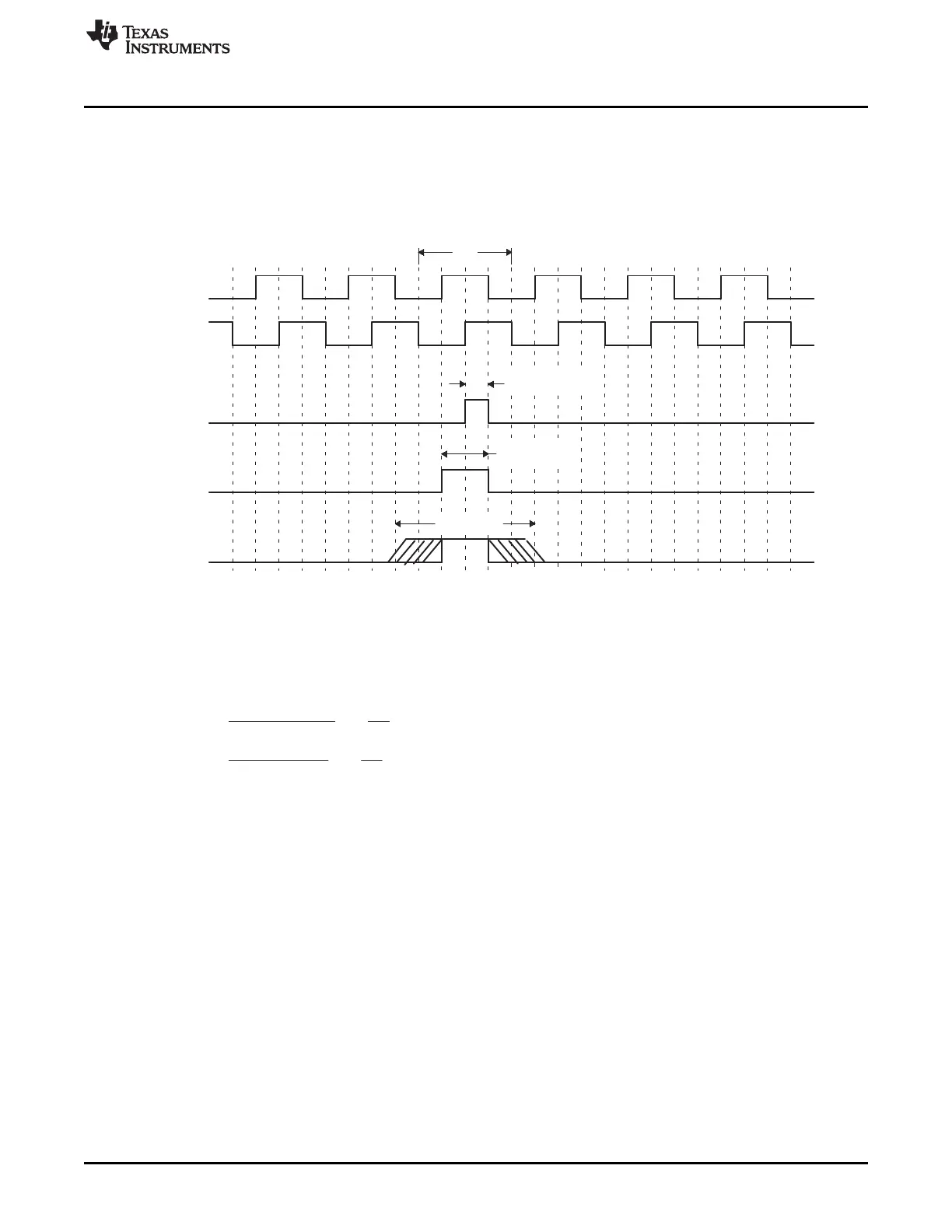
QEPA
QEPB
QEPI
(gated to
A and B)
QEPI
(gated to A)
QEPI
(ungated)
www.ti.com
Introduction
391
SPRUI07–March 2020
Submit Documentation Feedback
Copyright © 2020, Texas Instruments Incorporated
Enhanced Quadrature Encoder Pulse (eQEP)
Quadrature encoders from different manufacturers come with two forms of index pulse (gated index pulse
or ungated index pulse) as shown in Figure 6-3. A nonstandard form of index pulse is ungated. In the
ungated configuration, the index edges are not necessarily coincident with A and B signals. The gated
index pulse is aligned to any of the four quadrature edges and width of the index pulse and can be equal
to a quarter, half, or full period of the quadrature signal.
Figure 6-3. Index Pulse Example
Some typical applications of shaft encoders include robotics and computer input in the form of a mouse.
Inside your mouse you can see where the mouse ball spins a pair of axles (a left/right, and an up/down
axle). These axles are connected to optical shaft encoders that effectively tell the computer how fast and
in what direction the mouse is moving.
General Issues: Estimating velocity from a digital position sensor is a cost-effective strategy in motor
control. Two different first order approximations for velocity may be written as:
(1)
(2)
where
v(k): Velocity at time instant k
x(k): Position at time instant k
x(k-1): Position at time instant k-1
T: Fixed unit time or inverse of velocity calculation rate
ΔX: Incremental position movement in unit time
t(k): Time instant "k"
t(k-1): Time instant "k-1"
X: Fixed unit position
ΔT: Incremental time elapsed for unit position movement.
Equation 1 is the conventional approach to velocity estimation and it requires a time base to provide a unit
time event for velocity calculation. Unit time is basically the inverse of the velocity calculation rate.
 Loading...
Loading...