v
(
k
)
+
x
(
k
)
* x
(
k * 1
)
T
+
DX
T
o
∆X
x(k−1)
∆T
t(k)
t(k−1)
T
QEPA
QEPB
QCLK
QPOSCNT
UPEVNT
QCTMR
UTOUT
x(k)
www.ti.com
eQEP Edge Capture Unit
407
SPRUI07–March 2020
Submit Documentation Feedback
Copyright © 2020, Texas Instruments Incorporated
Enhanced Quadrature Encoder Pulse (eQEP)
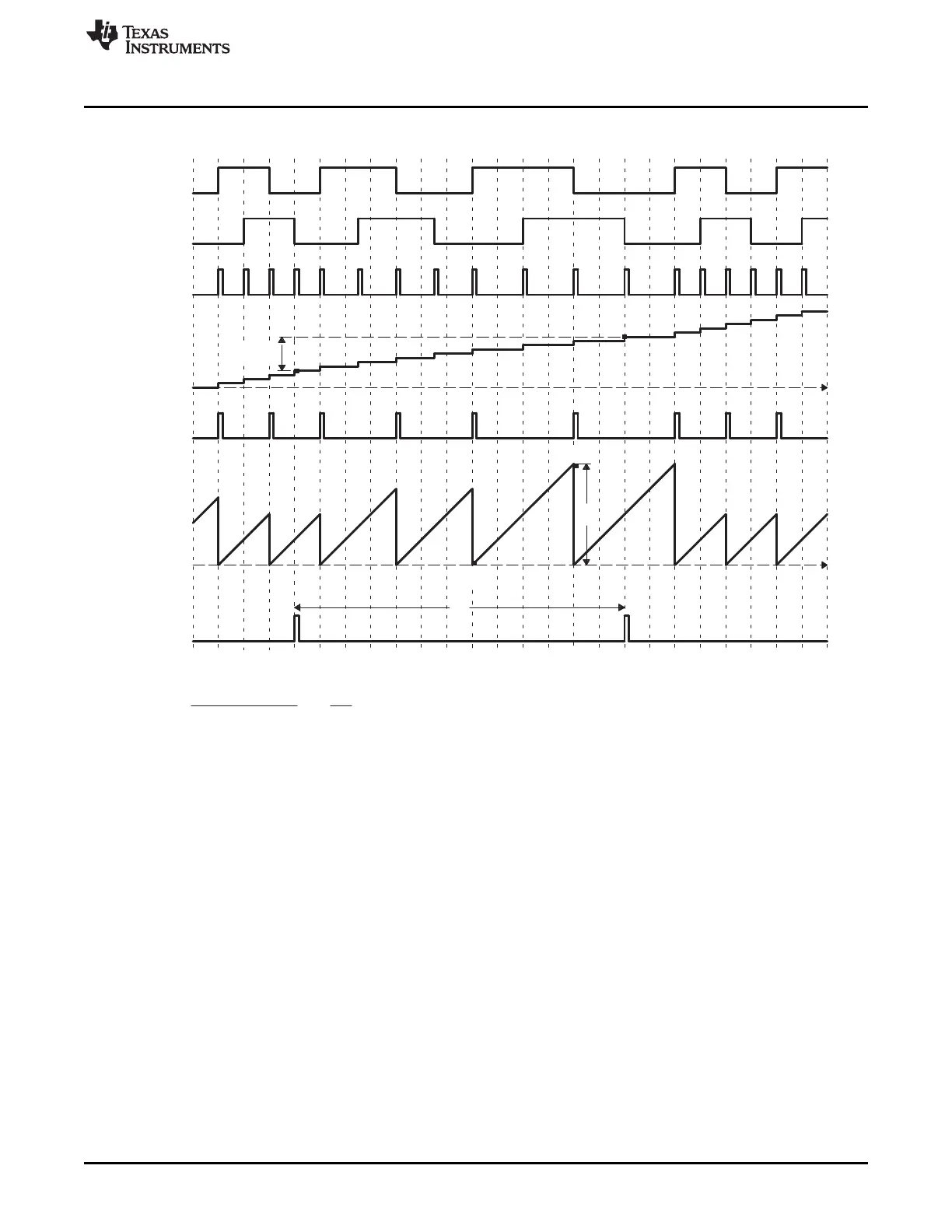
Figure 6-17. eQEP Edge Capture Unit - Timing Details
Velocity calculation equations:
(4)
where
v(k): Velocity at time instant k
x(k): Position at time instant k
x(k-1): Position at time instant k-1
T: Fixed unit time or inverse of velocity calculation rate
ΔX: Incremental position movement in unit time
X: Fixed unit position
ΔT: Incremental time elapsed for unit position movement
t(k): Time instant "k"
t(k-1): Time instant "k-1"
Unit time (T) and unit period(X) are configured using the QUPRD and QCAPCTL[UPPS] registers.
Incremental position output and incremental time output is available in the QPOSLAT and QCPRDLAT
registers.
 Loading...
Loading...