CAN Controller
UG0331 User Guide Revision 15.0 461
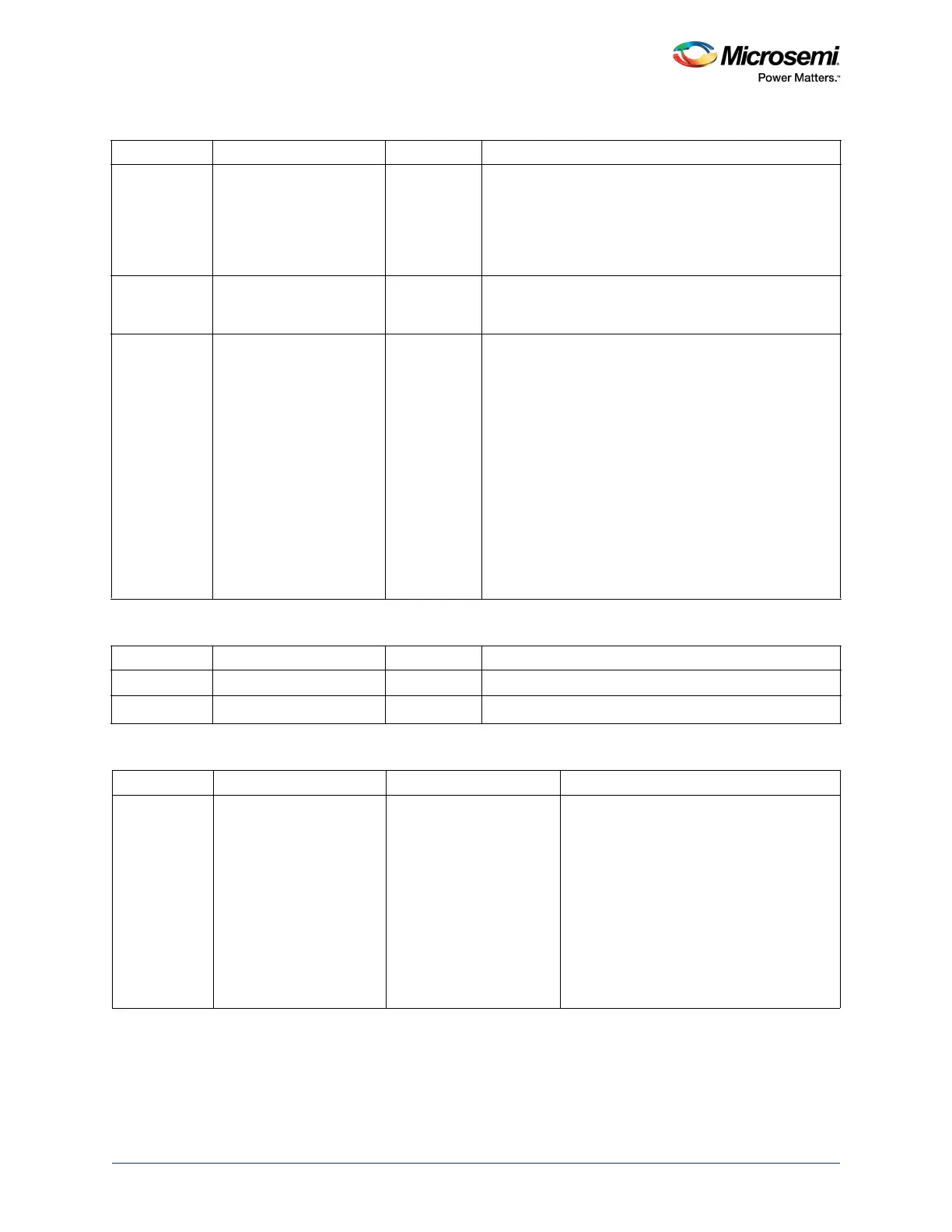
2 RTRabort 0 RTR abort request; Command bit
0: Idle
1: Requests removal of a pending RTR message reply.
The flag is cleared when the message was
removed or when the message won arbitration.
The TxReq flag is cleared at the same time
1 RTRP 0 RTReply pending; Command bit
0: No RTR reply request pending
1: RTR reply request pending
0 MsgAv/RTRS 0 Message available/RTR sent; Command bit
If RTRreply flag is set, this bit shows if an RTR auto-reply
message has been sent, otherwise it indicates if the
buffer contains a valid message.
Read
0: Idle
1: New message available (RTRreply = 0), RTR
auto-reply message sent (RTRreply = 1)
Write
0: Idle
1: Acknowledges receipt of new message or
transmission of RTR auto-reply message.
Before acknowledging receipt of a new message, the
message content must be copied into system memory.
Acknowledging a message clears the MsgAv flag.
Table 451 • RX_MSG0_ID
Bit Number Name Reset Value Description
[31:3] ID[28:0] RxMessage0 buffer identifier (29-bit wide)
[2:0] Reserved 0 N/A
Table 452 • RX_MSG0_DATA_HIGH
Bit Number Name Reset Value Description
[31:0] RX_MSG0_DATA_HIGH [31:24]: CAN data byte 1
[23:16]: CAN data byte 2
[15:8]: CAN data byte 3
[7:0]: CAN data byte 4
The byte mapping can be set using the CAN
swap_endian configuration bit.
swap_endian = 0, default:
[31:24]: CAN data byte 1
[23:16]: CAN data byte 2
[15:8]: CAN data byte 3
[7:0]: CAN data byte 4
swap_endian = 1
[31:24]: CAN data byte 4
[23:16]: CAN data byte 3
[15:8]: CAN data byte 2
[7:0]: CAN data byte 1
Table 450 • RX_MSG0_CTRL_CMD (continued)
Bit Number Name Reset Value Description