Boot Assist Module (BAM)
MPC5606S Microcontroller Reference Manual, Rev. 7
Freescale Semiconductor 177
6.5.6 Bootstrap with CAN
6.5.6.1 Configuration
Boot from FlexCAN protocol is implemented by the FlexCAN_0 module. The pins used are:
• CAN_TX—corresponds to pin PB[0]
• CAN_RX—corresponds to pin PB[1]
Boot from FlexCAN uses the system clock driven by an external oscillator.
The FlexCAN controller is configured to operate at a baud rate = system clock frequency/40 (see Table 6-6
for examples of baud rate).
It uses the standard 11-bit identifier format detailed in FlexCAN 2.0A specification.
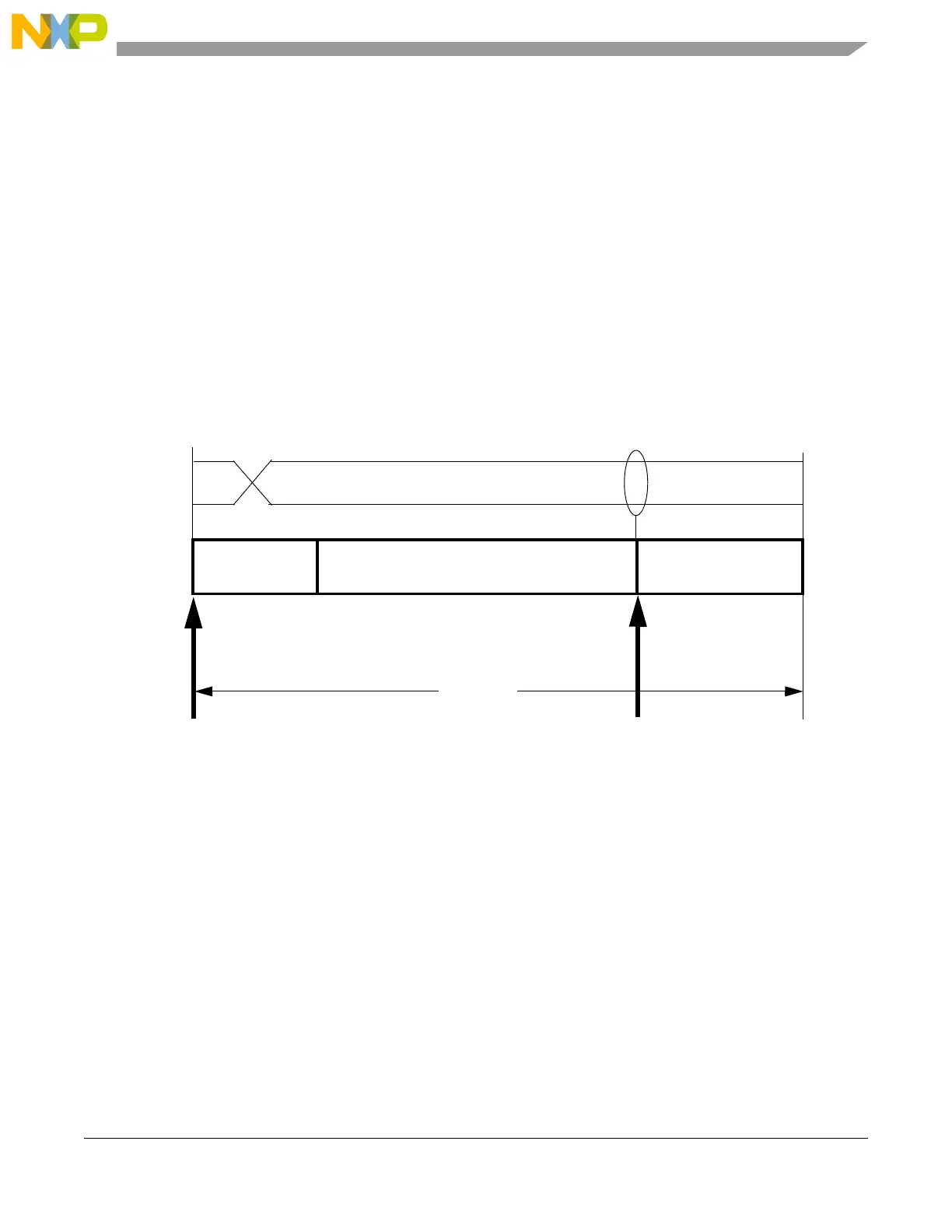
FlexCAN controller bit timing is programmed with 10 time quanta, and the sample point is 2 time quanta
before the end, as shown in Figure 6-8.
Figure 6-8. FlexCAN Bit Timing
SYNC_SEG Time Segment 1 Time Segment 2
Sample Point
NRZ Signal
Transmit Point
1
time quantum time quanta time quanta
7 2
1 Bit Time
1 time quantum = 4 system clock periods

 Loading...
Loading...







