Power Control Unit (MC_PCU)
MPC5606S Microcontroller Reference Manual, Rev. 7
990 Freescale Semiconductor
Each power domain which is powered down is held in a reset state. Read/write accesses to peripherals in
those power domains will result in a transfer error.
29.4.4 Mode transitions
On a mode change requested by the MC_ME, the MC_PCU evaluates the power configurations for all
power domains. It compares the settings in the PCU_PCONFn registers for the new mode with the settings
for the current mode. If the configuration for a power domain differs between the modes, a power state
change request is generated. These requests are handled by a finite state machine to ensure a smooth and
safe transition from one power state to another.
29.4.4.1 DRUN, Safe, Test, Run0…3, Halt, and Stop mode transition
The DRUN, Safe, Test, Run0…3, Halt, and Stop modes allow an increased power saving. The level of
power saving is software-controllable via the settings in the PCU_PCONFn registers for power domain #2
onwards. The settings for power domains #0 and #1 cannot be changed. Therefore, power domains #0 and
#1 remain connected to the power supply for all modes beside Standby.
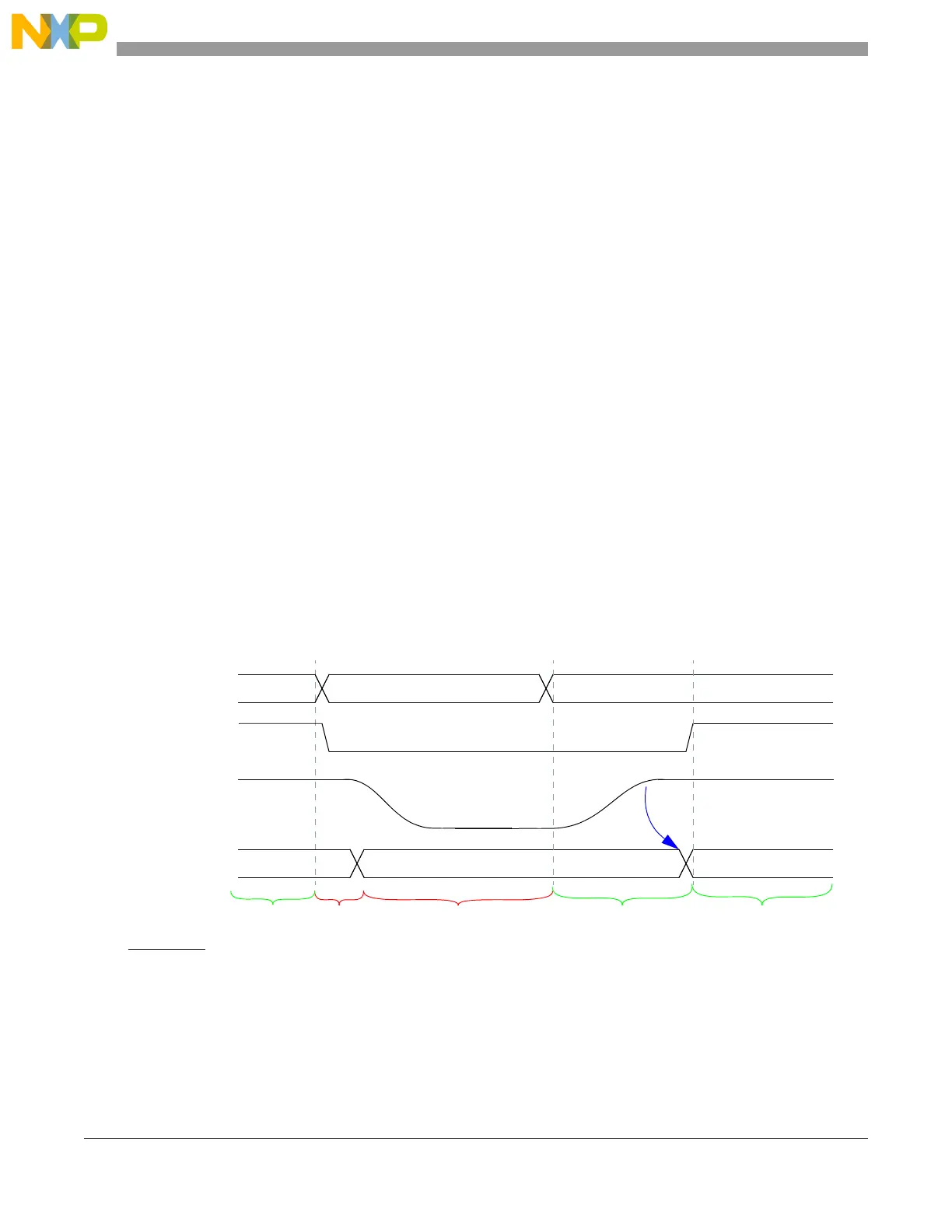
Figure 29-6 shows an example for a mode transition from Run0 to Halt and back, which will result in
power domain #2 being powered down during the Halt mode. In this case, PCU_PCONF2.HALT is
programmed to be 0.
When the MC_PCU receives the mode change request to Halt mode, it starts its power-down phase.
During the power-down phase, clocks are disabled and the reset is asserted resulting in a loss of all
information for this power domain.
Then the power domain is disconnected from the power supply (power-down state).
Figure 29-6. MC_PCU Events During Power Sequences (non-Standby mode)
When the MC_PCU receives a mode change request to Run0, it starts its startup phase if
PCU_PCONF2.RUN0 is 1. The power domain is re-connected to the power supply, and the voltage in
new mode
power-down
RUN0
voltage in
PSTAT.PD2
HALT
RUN0
Notes:
Not drawn to scale; PCONF2.RUN0 = 1; PCONF2.HALT = 0
current mode
startup phase
power domain #2
RUN0 HALT
RUN0
requested by ME
power-down state
startup statestartup state
phase