Shape Search IIFH/FZ5 Processing Item Function Reference Manual
165
2
Inspecting and Measuring
Key Points for Adjustment
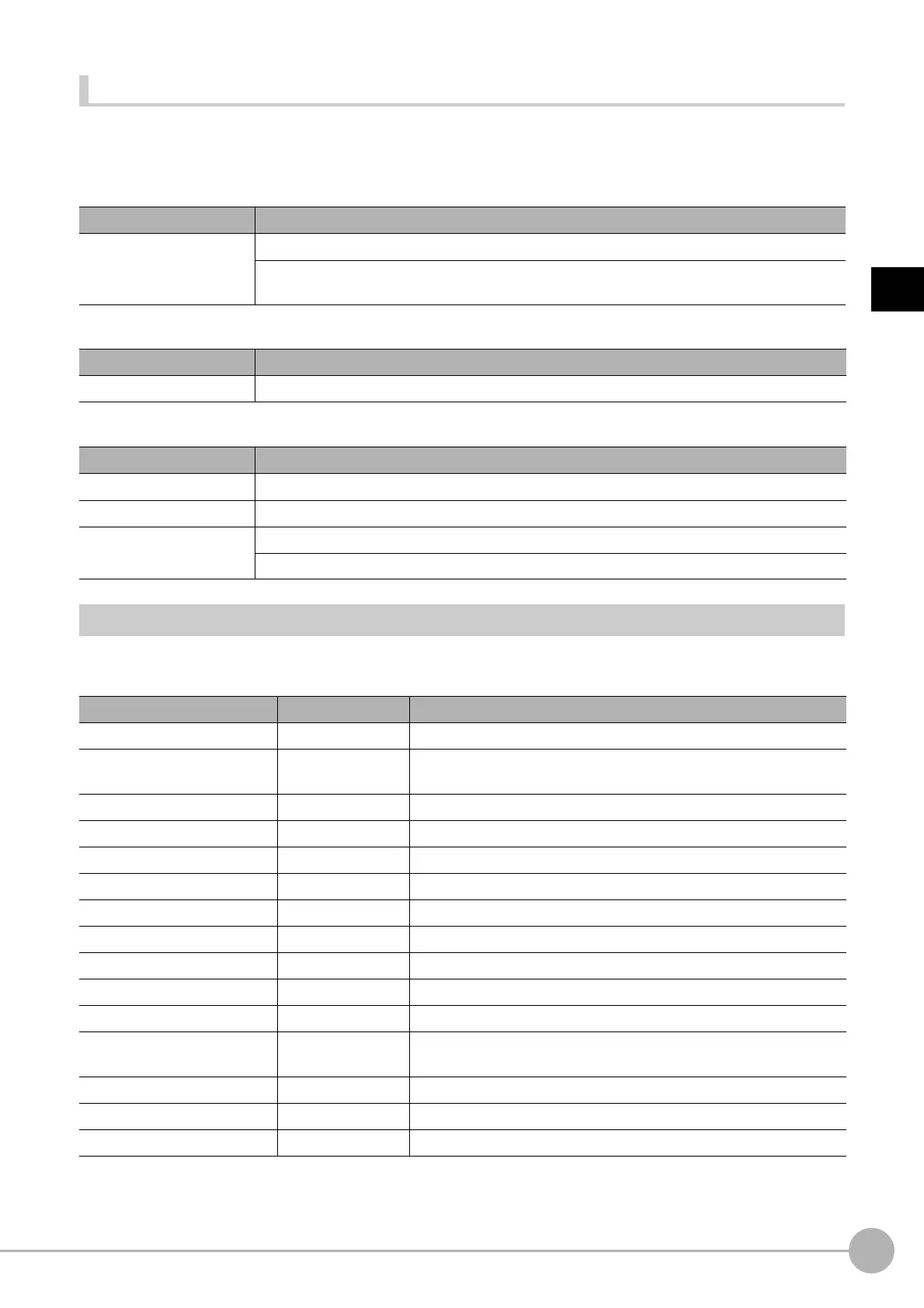
Select the adjustment method referring to the following points.
When the measurement results are unstable
Searching other positions
The judgement is NG (insufficient memory)
When the processing speed is slow
Measurement Results for Which Output Is Possible (Shape Search II)
The following values can be output using processing items related to results output. It is also possible to
reference measurement values from expressions and other processing units.
Parameter to be adjusted Remedy
Measurement parameter
If the precision is low, check "High-Prec.".
If detection or resulting judgement are unstable, set a smaller value for "Candidate LV", specify
a smaller value for "Candidate LV".
Parameter to be adjusted Remedy
Region setting Make the search region as small as possible.
Parameter to be adjusted Remedy
Region setting Make the search region as small as possible.
Model registration Make the area to register as the model as small as possible.
Measurement parameter
If images that should be judged OK vary little, specify a larger value for "Candidate LV".
If the position precision is high, uncheck "High-Prec.".
Measurement items Character string Description
Judge JG Judgement result
Count C
Number of search items detected
If none detected, 0
Correlation CR Correlation value with the model
Position X X X coordinate of the position where the model is detected
Position Y Y Y coordinate of the position where the model is detected
Angle θ TH Angle of the position where the model is detected
Ref. position X SX X coordinate of the reference position of the registered model
Ref. position Y SY Y coordinate of the reference position of the registered model
Ref. angle ST Angle of the registered model
Detection point RX RX X coordinate of the registered model
Detection point RY RY Y coordinate of the registered model
Correlation value N (N = 00 to
31)
CRN Detected search N correlation valu
e (N
= 00 to 31)
Position XN (N = 00 to 31) XN Detected search N position X (N = 00 to 31)
Position YN (N = 00 to 31) YN Detected search N position Y (N = 00 to 31)
Angle THN (N = 00 to 31) THN Detected search N angle TH (N = 00 to 31)

 Loading...
Loading...









