Transfer Position Data
778
FH/FZ5 Processing Item Function Reference Manual
Transfer Parameter (Transfer Position Data)
The item sets data related to conversion. Sets a calculation formula using the pre-conversion position and axis
position and post-conversion axis position.
1 Click [Transfer parameter] in the Item Tab area.
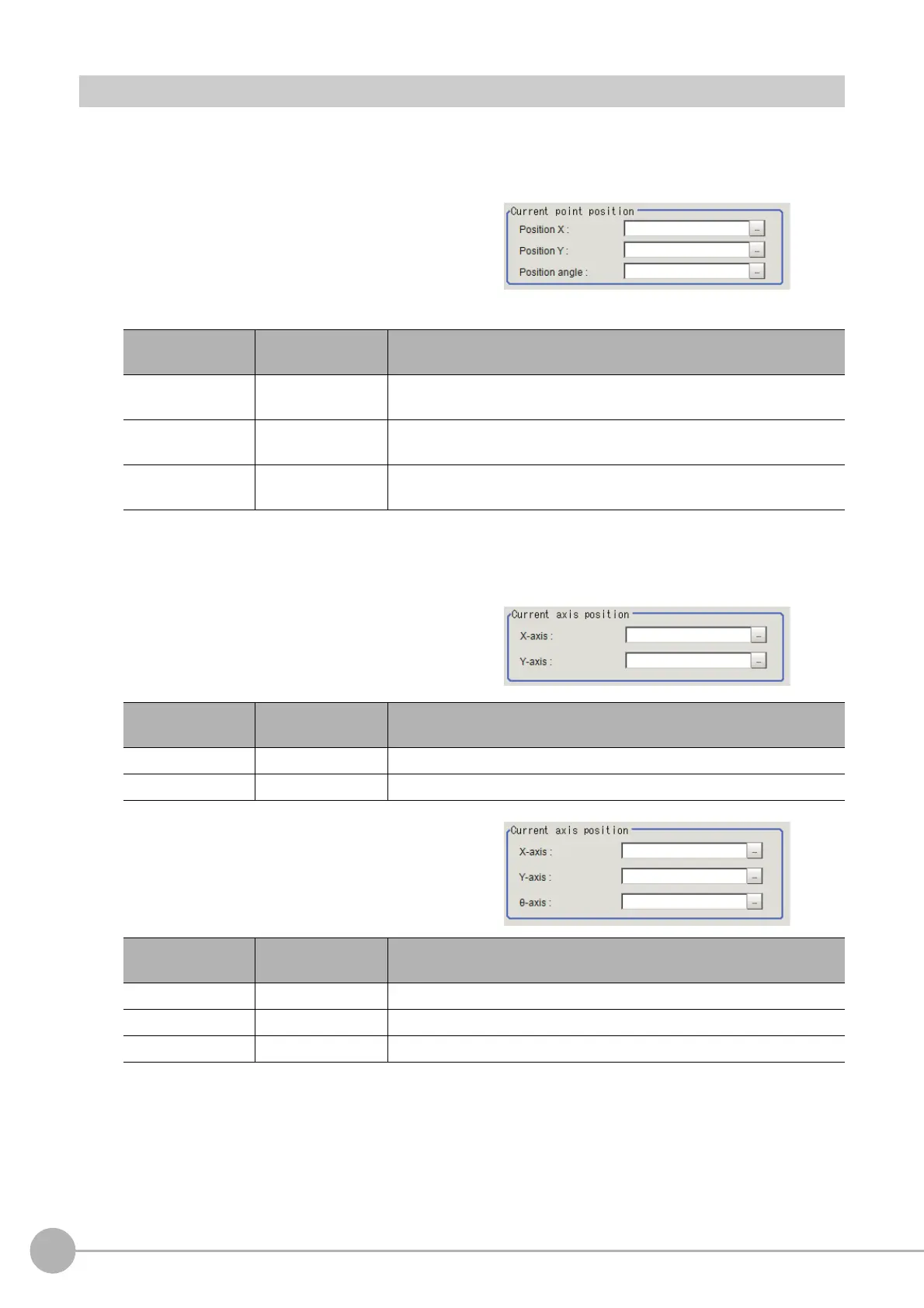
2 Set each item in the Current point
position area.
3 Set each item in the Current axis position area before conversion.
Set how far each axis moved from the origin return state (all axes are at the origin point) when [Current
angle] is measured.
If the stage type of the reference data is
the XY stage or the robot type is 3-axis
robot
If the stage type of the reference data is
the XYθ stage, θXY stage
or the robot
type is 4-axis robot
Setting item
Setting value
[Factory default]
Description
Position X -
Set the calculation formula that obtains the position X of the conversion
target.
Position Y -
Set the calculation formula that obtains the position Y of the conversion
ta
rget.
Position angle -
Set the calculation formula that obtains the
angle of the conversion target.
To convert positions X and Y only, set 0 as the angle.
Setting item
Setting value
[Factory default]
Description
X-axis - Set how far the X axis position moved from the origin.
Y-axis - Set how far the Y axis position moved from the origin.
Setting item
Setting value
[Factory default]
Description
X-axis - Set how far the X axis position moved from the origin.
Y-axis - Set how far the Y axis position moved from the origin.
θ-axis - Set how far the θ axis position
moved from the origin.

 Loading...
Loading...









