Robot DataFH/FZ5 Processing Item Function Reference Manual
743
4
Support Inspection and Measurement
Measurement Results for Which Output Is Possible (Robot Data)
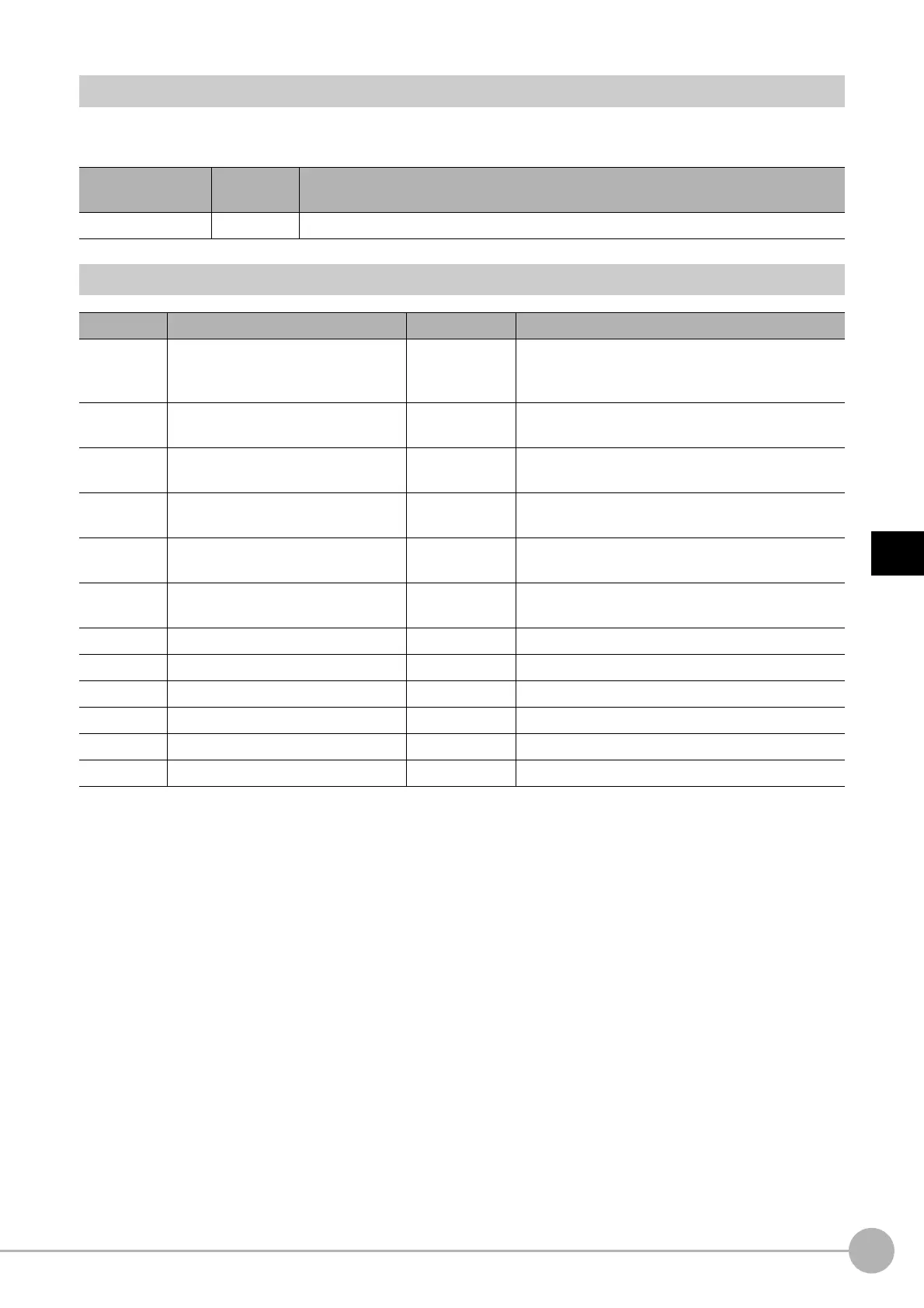
The following values can be output using processing items related to results output. It is also possible to
reference measurement values from expressions and other processing units.
External Reference Tables (Robot Data)
Measurement
items
Character
string
Description
Judge JG Judgement result
No. Data name Set/Get Data range
0 Judge Get only
0: No judgement(unmeasured)
1: Judgement result OK
-1: Judgement result NG
120 Robot type Set/Get
0: Three axis (XYZ) robot
1: Four axis (XYZR) robot
121 Rotation polarity Set/Get
-1: Negative
1: Positive
122 Picking method Set/Get
0: Picking at a fixed position
1: Picking at a measurement position
123 Camera movement axis X-axis Set/Get
0: Camera moving axis X is not used
1: Camera moving axis X is used
124 Camera movement axis Y-axis Set/Get
0: Camera moving axis X is not used
1: Camera moving axis X is used
130 Lower limit of X-axis movement Set/Get -99,999.9999 to 99,999.9999
131 Upper limit of X-axis movement Set/Get -99,999.9999 to 99,999.9999
132 Lower limit of Y-axis movement Set/Get -99,999.9999 to 99,999.9999
133 Upper limit of Y-axis movement Set/Get -99,999.9999 to 99,999.9999
134 Lower limit of θ-ax
i
s movement Set/Get -180.0000 to 180.0000
135 Upper limit of θ-axi
s movement Set/Get -180.0000 to 180.0000

 Loading...
Loading...









