Robot DataFH/FZ5 Processing Item Function Reference Manual
741
4
Support Inspection and Measurement
Data Setting (Robot Data)
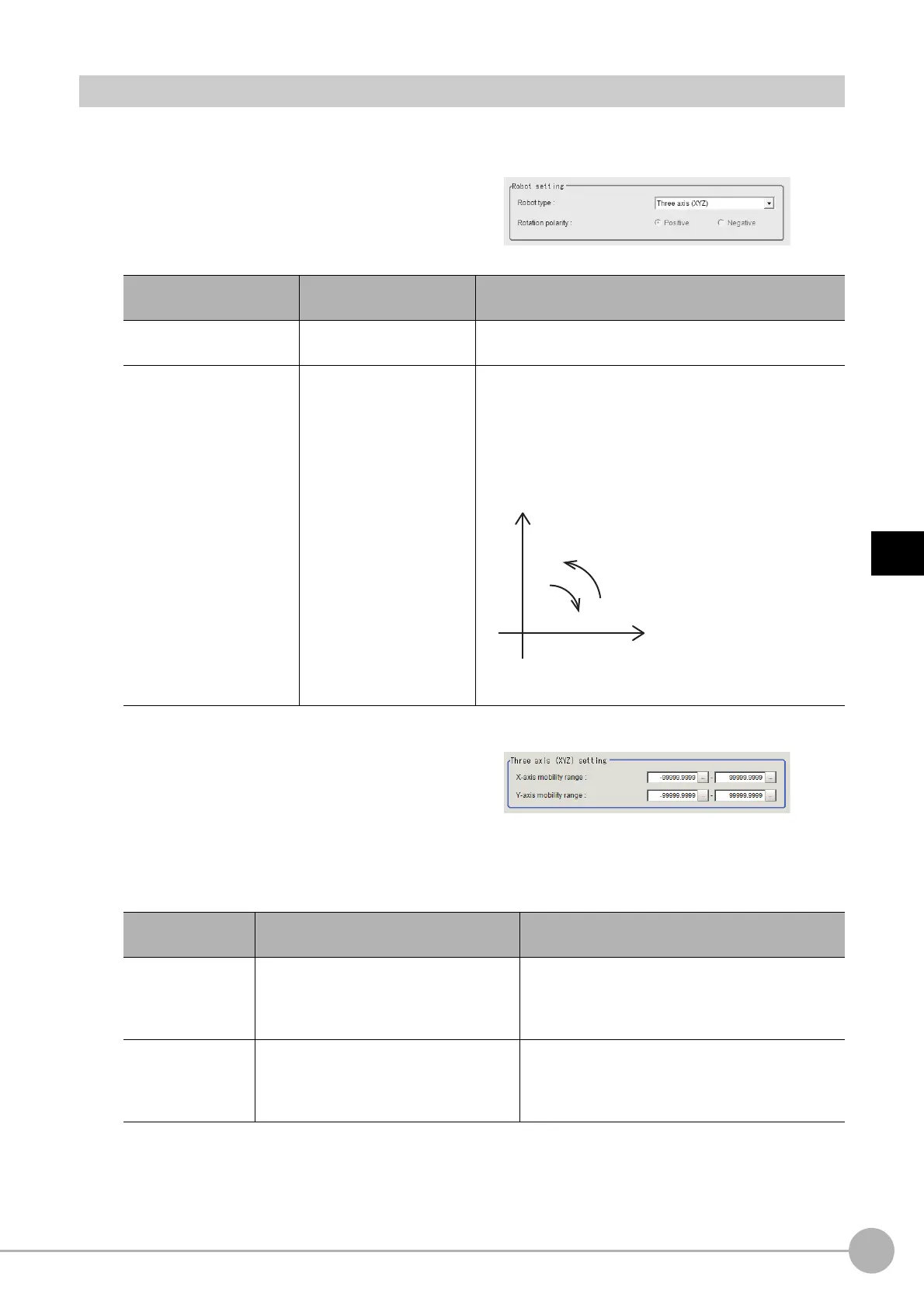
Set data based on the specification of the robot.
1 In the Item Tab area, click [Data setting].
2 Select the type of the robot in the "Robot
setting" area.
Selecting "four axis (XYZR) robot" will enable
you to select the rotation polarity.
3-axis (XYZ) robot
1 Selecting "Three axis (XYZ)" will display
the "Three axis (XYZ) setting" area.
2 Click [...] in X-axis limit in the Three axis
(XYZ) setting area to set the upper and
lower limit values.
3 Likewise click [...] in Y-axis limit to set the upper and lower limit values.
Setting item
Setting value
[Factory default]
Description
Robot type
• [Three axis (XYZ)]
• Four axis (XYZR)
Select the type of the robot to be used.
Rotation polarity
• [Positive]
• Negative
Select the rotation direction defined in the equipment is
positive or neg
ative compared to the rotation direction in
the robot coordinate system.
Positive: From the X axis to Y axis
Negative: From the Y axis to X axis
Setting item
Setting value
[Factory default]
Description
X-axis limit
-99999.9999 to 99999.9999
[-99999.9999] to [99999.9999]
Set the upper and lower limit values for the X axis
movement range.
Units of the coordinate system
set in calibration is
used.
Y-axis limit
-99999.9999 to 99999.9999
[-99999.9999] to [99999.9999]
Set the upper and lower limit values for the Y axis
movement range.
Units of the coordinate system
set in calibration
is
used.
Y
X
A
B
Stage coordinate system
When positive rotation
direction of the device is
A: positive polarity
B: negative polarity

 Loading...
Loading...









