Robot Data
742
FH/FZ5 Processing Item Function Reference Manual
4-axis (XYZR) robot
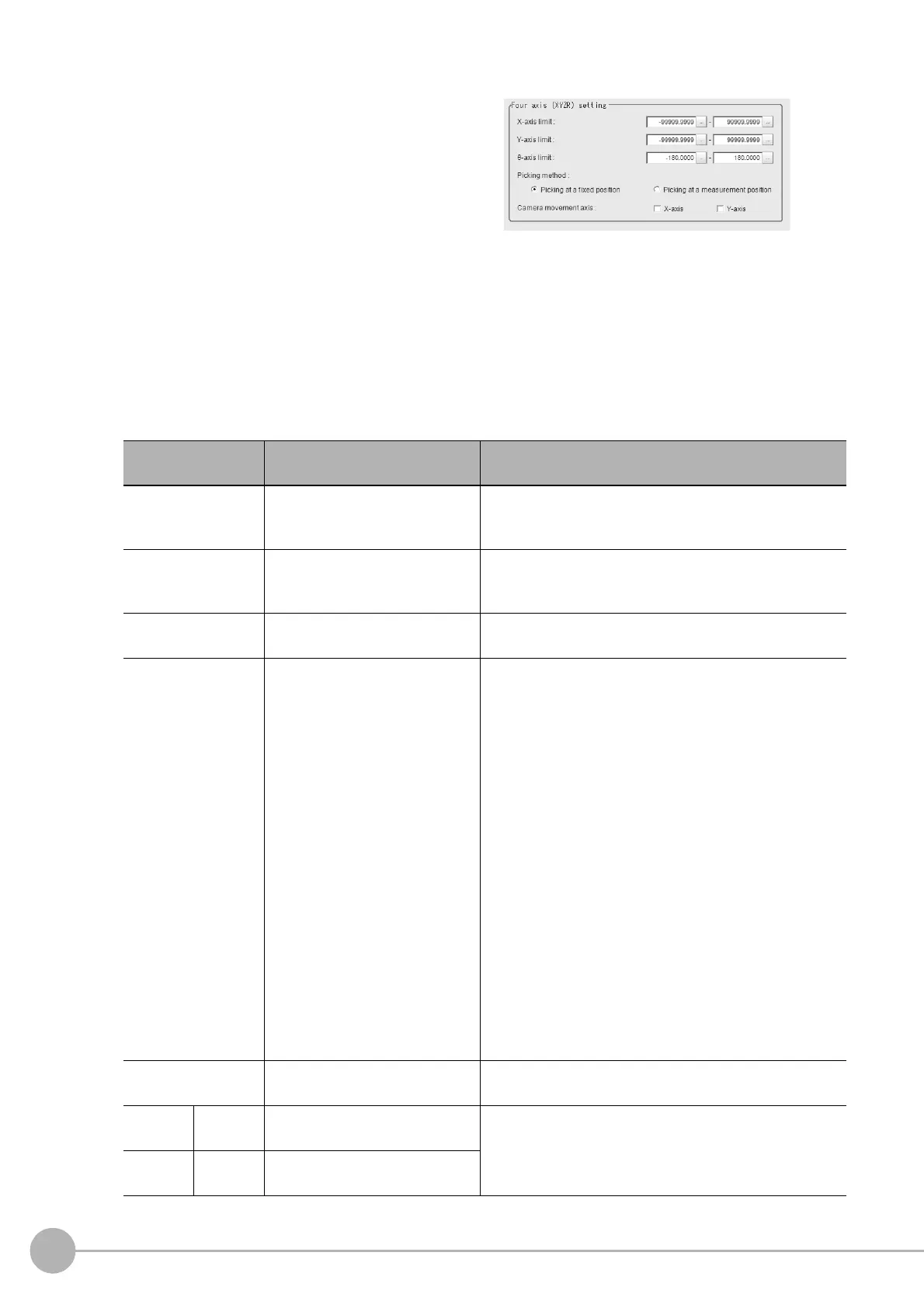
1 Selecting "Four axis (XYZR)" will display
the "Four axis (XYZR) setting" area.
2 Click [...] in X-axis limit in the "Four axis
(XYZR) setting" area to set the upper and
lower limit values.
3 Likewise click [...] in Y-axis limit to set the upper and lower limit values.
4 Likewise click [...] in θ-axis limit to set the upper and lower limit values.
5 Select the control method for the robot from the "Picking method".
6 If the camera is moved, select the axis to which the camera is attached from Camera
movement axis.
Setting item
Setting value
[Factory default]
Description
X-axis limit
-99999.9999 to 99999.9999
[-99999.9999] to [99999.9999]
Set the upper and lower limit values for the X axis
movement range.
Unit
s of the coordinate system set in calibration is used.
Y-axis limit
-99999.9999 to 99999.9999
[-99999.9999] to [99999.9999]
Set the upper and lower limit values for the Y axis
movement range
.
Unit
s of the coordinate system set in calibration is used.
θ-axis limit
-180.0000 to 180.0000
[-180.0000] to [180.0000]
Set the upper and lower limit values for the θ axi
s angle
range. The unit is degree.
Picking method
• Picking at a fixed position
• Picking at a measurement
position
Select the robot control method.
The robot control settings change depending on at which
pha
se
position alignment is performed from "the workpiece
grasping phase" to "movement phase".
(1) Go to a fixed
position to pick up an object
If the robot is controlled using the Sensor Controller
measuremen
t result, so that the robot can go to the same
position every time during workpiece to pick up an object
and place it on a specific position after grasping the object,
select this. This is some kind of palletizing application.
Specifically speaking, in this setting, the same calculation
as the XYθ stage is used.
(2) Go to the measurement position of workpiece to pick
up an
object
If the robot is controlled so that the robot goes to grasp the
workpi
ece and then
places it on a specific position after
grasping it using the measurement result of this vision
sensor every time, select this. This is some kind of
depalletizing application. Specifically speaking, in this
setting, the same calculation as the θXY stage is used.
Camera movement
axis
X-axis
• Checked
• [Unchecked]
Enable this setting if the camera moves instead of the
robot axis.
If this is disabled, calculation for movement amount and so
on is performed on
the premises that the stage moves.
Y-axis
• Checked
• [Unchecked]

 Loading...
Loading...









