Transfer Position Data
776
FH/FZ5 Processing Item Function Reference Manual
Transfer Position Data
Calculates the post movement position/angle data when each axis of a stage or robot is moved for a given
distance. Use this when you want to measure the stage after moving a given distance and obtain the pre-
movement position/angle data.
At least 2 or 3 measurement points are needed to calcu
l
ate axis movement amounts. Axis movement amounts
can usually be stably calculated by installing a camera at each measurement point and measuring 4 or 5
measurement points.
The basic approach is to calculate movement amounts a
t
high precision with the same number of cameras as
there are measurement points. But it is also possible to measure multiple measurement points contained in a
single camera’s field of view.
Used in the Following Case
• When you want to position the FPD panel
Settings Flow (Transfer Position Data)
The position/angle conversion should be set up with the following procedure.
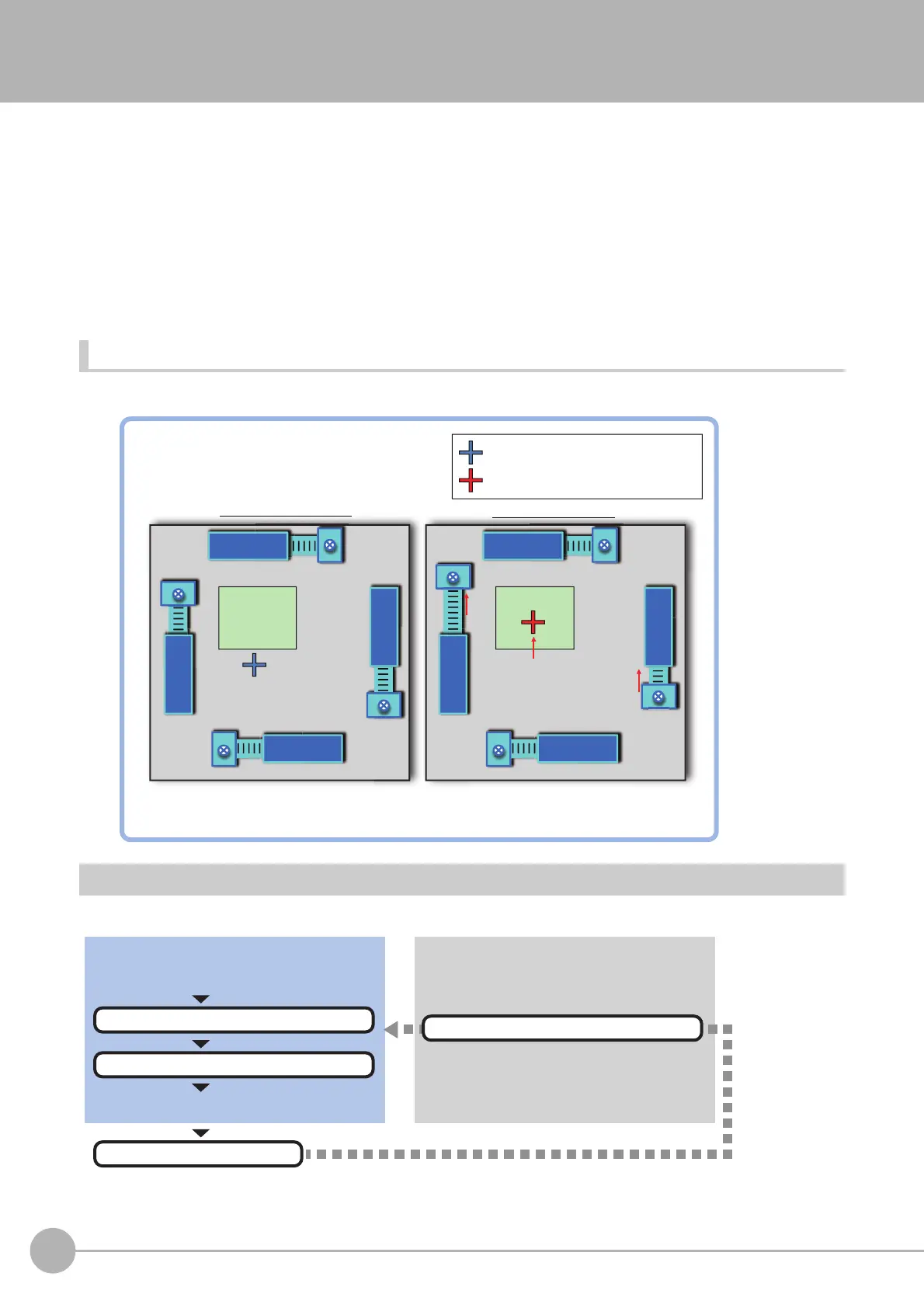
Filtered position: (X2, Y2, TH2)
Filtered axis position: U2, V2, W2, R2
Axis position before filtering: U1, V1, W1, R1
This is used when a stage or robot moves a mark that is
outside the camera field of view to a position within the
camera field of view to measure it.
Position before filtering: (X1, Y1, TH1)
(V1 = V2 + ΔV R1 = R2 + ΔR)
Before stage movement
After stage movement
ΔR
ΔV
(X2, Y2, TH2)
(X1, Y1, TH1)
The mark position before stage
movement is obtained as the
filtered position.
U axis motor
R axis motor
R axis motor
V axis motor
V axis motor
W axis motor W axis motor
U axis motor
Make sure to set Set as necessary.
Check results/make adjustments
▲
Machine Setting (Transfer Position Data)
Start
▲
Transfer Parameter (Transfer Position Data)
Settings complete
Test measurement
▲
Output Parameter (Transfer Position Data)

 Loading...
Loading...









