Ec CrossFH/FZ5 Processing Item Function Reference Manual
213
2
Inspecting and Measuring
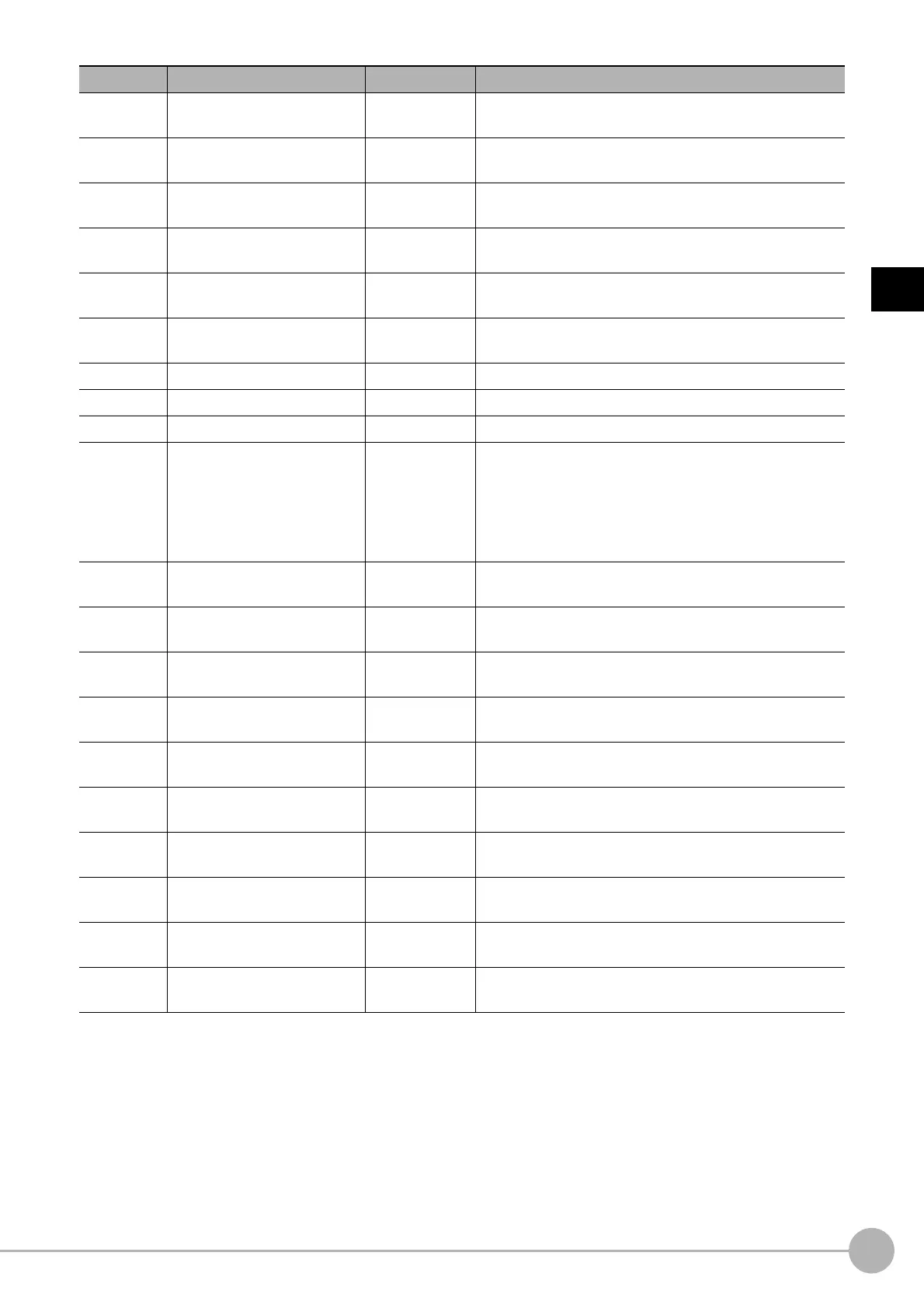
*1: The reference coordinates based on the selection in the Method area of the [Ref.setting] tab can be Get only.
*2: The reference coordinates based on the selection of Numerical in the Method area of the [Ref.setting] tab can be Set/Get.
165
Judgement condition: Lower
limit of cross Y
Set
/Get -99999.9999 to 99999.9999
166
Judgement condition: Upper
limit of
cross Y
Set
/Get -99999.9999 to 99999.9999
167
Judgement condition: Lower
limit of
angle
Set/Get -45 to 45
168
Judgement condition: Upper
limit of
angle
Set/Get -45 to 45
169
Judgement condition: Lower
l
i
mit of number of detections
Set/Get 0 to 10
170
Judgement condition: Upper
l
imit of number of detections
Set/Get 0 to 10
171 Reference X
*2
Set/Get 0 to 99999.9999
172 Reference Y
*2
Set/Get 0 to 99999.9999
173 Reference angle Set/Get -180 to 180
174 Line connection level Set/Get
0: 1
1: 2
2: 3
3: 4
4: 5
5: Custom
176
Reference unit number for
re
fe
rence coordinate
Set/Get -1 to 9999
177
Reference type of reference
co
ordinate
Set/Get
0: Set by number
1: Unit reference
178 Reference angle update Set/Get
0: Not update
1: Update
179
Use coordinates before
position compensation
Set/Get
0: Not used
1 : Used
180
Coordinate X before position
co
mp
ensation
Set/Get -99999.9999 to 99999.9999
181
Coordinate Y before position
co
mp
ensation
Set/Get -99999.9999 to 99999.9999
182
Angle before position
co
mp
ensation
Set/Get -180 to 180
10000 + N
(N = 0 to 9)
Position Get only -99999.9999 to 99999.9999
10100 + N
(N = 0 to 9)
Position Get only -99999.9999 to 99999.9999
10200 + N
(N = 0 to 9)
Angle N Get only
-45 to 45
No. Data name Set/Get Data range

 Loading...
Loading...









