Vision Master Calibration
760
FH/FZ5 Processing Item Function Reference Manual
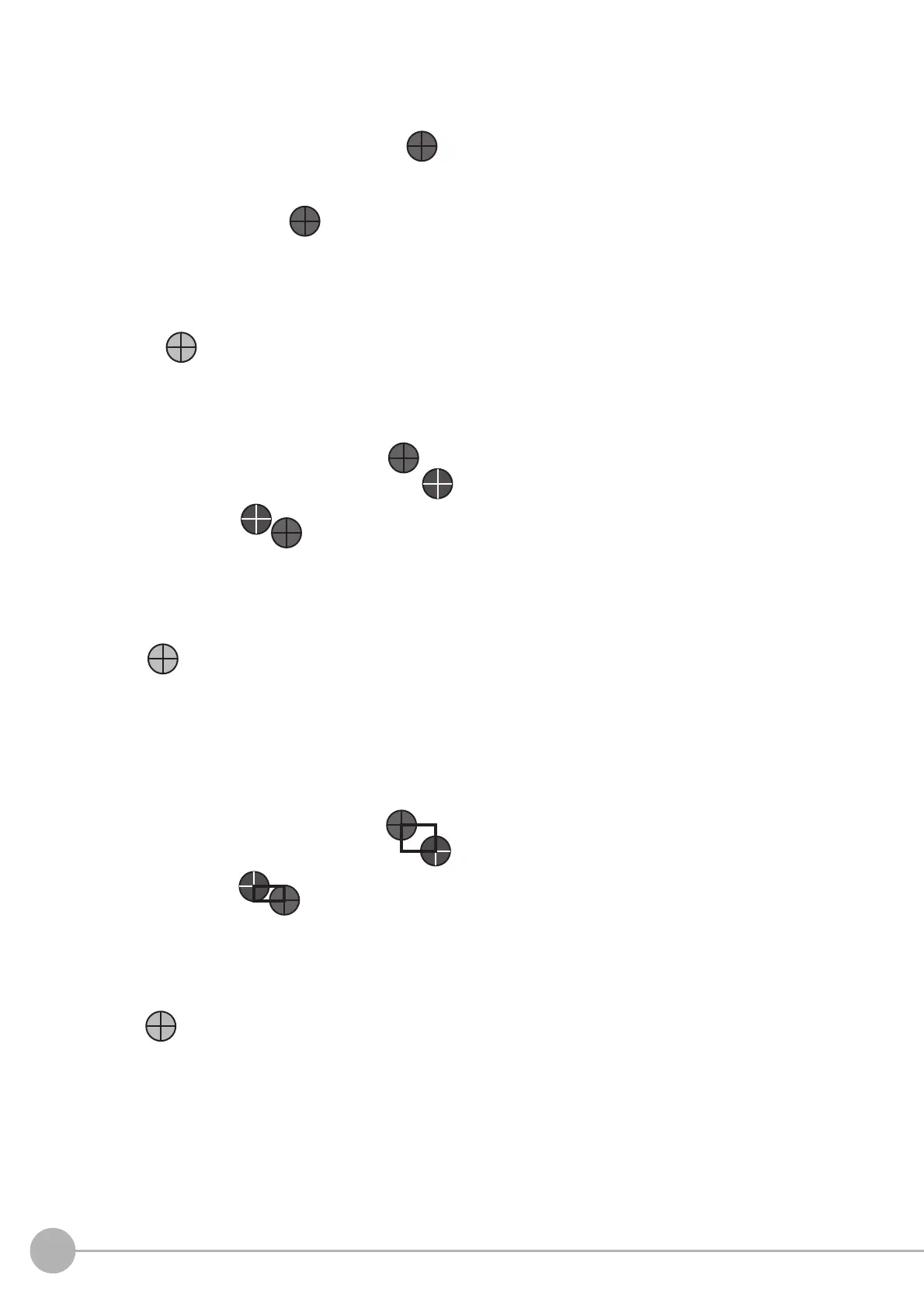
2) Sampling measurement is executed.
3) Calibration is executed from the sampling
result, conve
rts sampling position to
coordinate.
4) Calculates the absolute value’ s distance of
refe
rence position and reverse rotation
point.
5) Defines the maximum value of X coordinate
side as X-i
naccuracy, and the maximum
value of Y coordinate side as Y-inaccuracy.
• X-inaccuracy is given the more larger
val
ue of [X+a1-X1] or [X+a2-X2].
• Y-inaccuracy is given the more
lar
ger
value of [Y+b1-Y1] or [Y+a2-Y2].
Sampling position 2
Coordinate of camera
(x2, y2)
Sampling position 1
Coordinate of camera
(x1, y1)
Reference position (X,Y)
Sampling position 2
Coordinate of Calibration
Convert result (x2, y2)
Sampling position 1
Coordinate of Calibration
Convert result (x1, y1)
Sampling position 2
Coordinate of camera (x2, y2)
Sampling position 1
Coordinate of camera
(x1, y1)
Reference position (X,Y)
Sampling position2
Coordinate (X+a2,Y+b2)
Sampling position1
Coordinate (X+a1,Y+b1)
Sampling position2
A result afeter calibration
conversion.
Coordinate (X2,Y2)
Sampling position1
A result afeter calibration
conversion.
Coordinate (X1,Y1)
Reference position (X,Y)

 Loading...
Loading...









