Vision Master CalibrationFH/FZ5 Processing Item Function Reference Manual
759
4
Support Inspection and Measurement
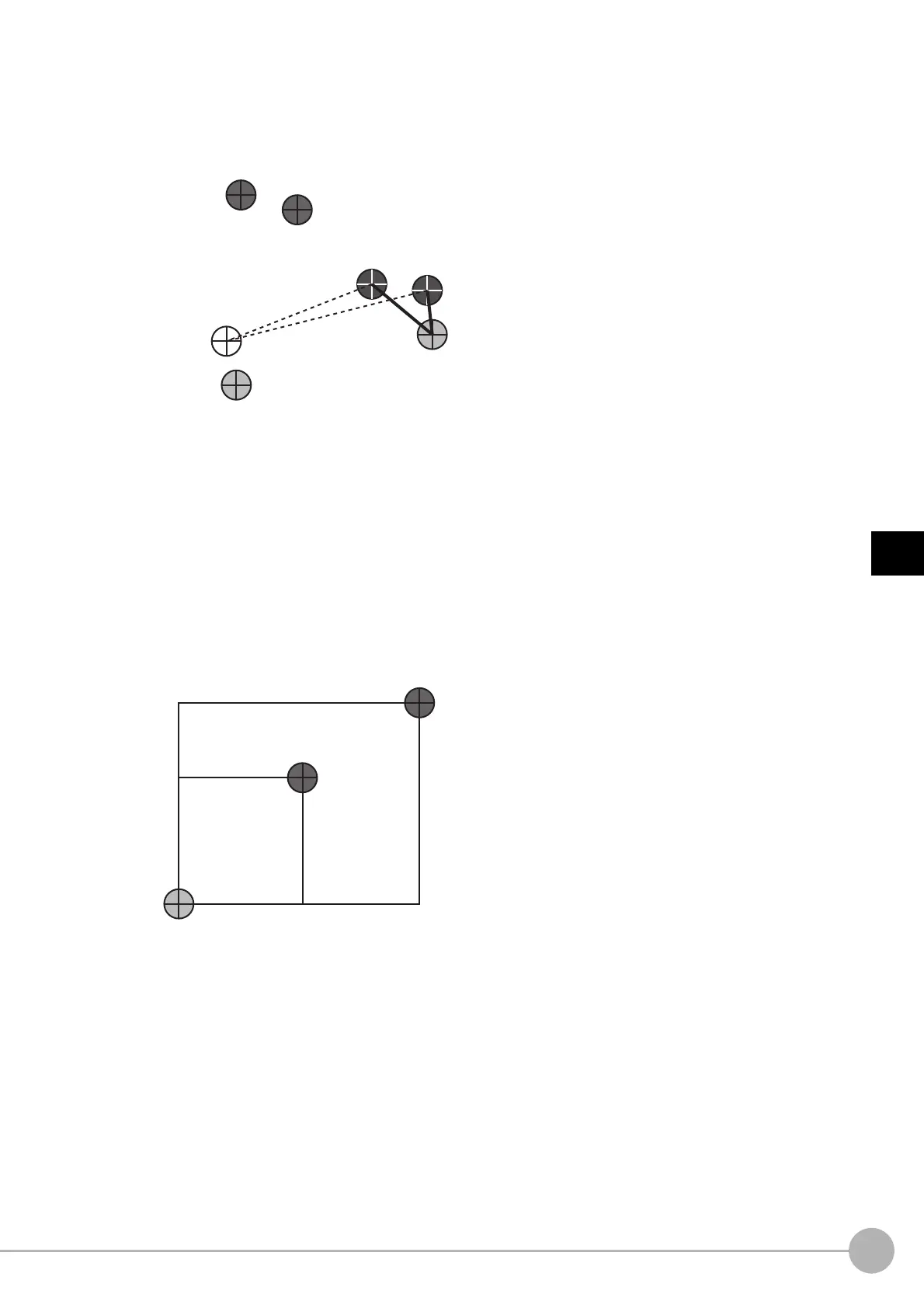
Maximum error detection values
This value is for confirming the accuracy of calibration result.
Output X and Y maximum error detection values when
the Stage has X or Y axis.
This value is calculated using a calibra
tion data calculated in Master calibration and a measurement result
sampled parallel movement.
If a problem of magnification, axis angle or center position of r
otation is occurred, this value may be larger.
4) The absolute distance value of each
coordinate from calibration conversion
result and sampling position.
5) Defines a maximum value of X coordinate
side as X maxi
mum error detection value.
Y coordinate side is same as X coordinate
side.
1) Parallel sampling is executed based on
sa
mp
ling settings. Reference position may
change depending on sampling method.
Reversed position from position
and calculated rotation center
(Sx1,Sy1)
Reversed position
from position
and calculated
rotation center
(Sx2,Sy2)
Calculation error
distance 1 (L1)
Calculation
error
distance 2
(L2)
Calculated
position of
rotation center
Sampling position1
(x1,y1)
Sampling position2
(x2,y2)
Reference position
(SX,SY)
Rotation center position of machine
Coordinate of sampling
position 2 (X+a2, Y+b2)
a2
a1
b1
b2
Coordinate of
sampling
position 1
(X+a1, Y+b1)
Reference position (X,Y)

 Loading...
Loading...









