Stage DataFH/FZ5 Processing Item Function Reference Manual
729
4
Support Inspection and Measurement
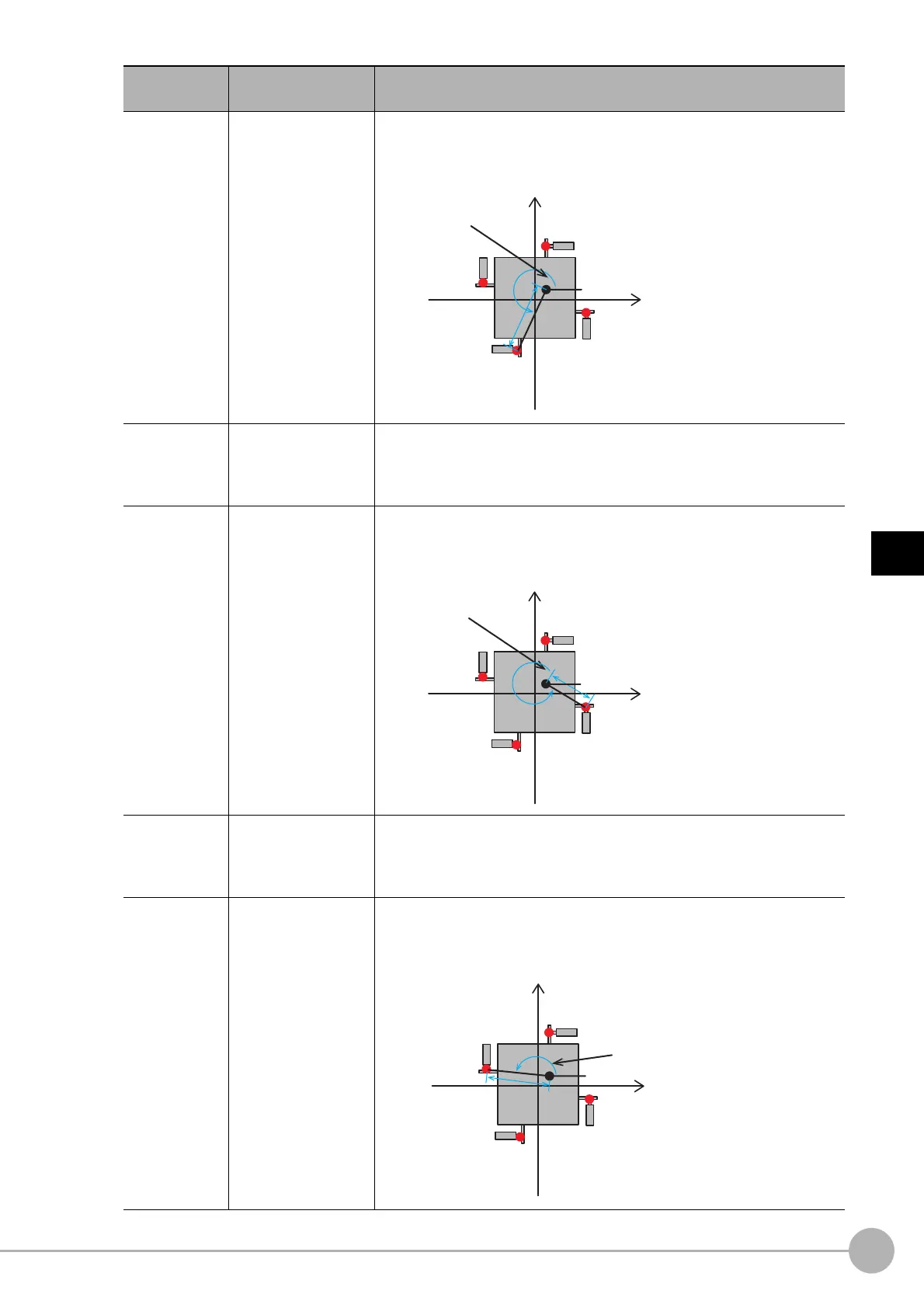
R1
0.000000 to
99999.999999
[0.000000]
Set the length of line segment connecting the stage rotation center and U
axis pi
vo
t point in the return to origin (each axis' movement amount is 0)
status.
θ1
-360.000000 to
360.000000
[0.000000]
Set the angle from the X axis of the line segment connecting the stage
rot
ation center and U axis pivot point in the return to origin (each axis'
movement amount is 0) status. As for the angle, the X axis is set to 0° and
the direction from X axis forward to Y axis forward is set to +.
R2
0.000000 to
99999.999999
[0.000000]
Set the length of line segment connecting the stage rotation center and V
axis pi
vo
t point in the return to origin (each axis' movement amount is 0)
status.
θ2
-360.000000 to
360.000000
[0.000000]
Set the angle from the X axis of the line segment connecting the stage
rota
tion center and V axis pivot point in the return to origin (each axis'
movement amount is 0) status. As for the angle, the X axis is set to 0° and
the direction from X axis forward to Y axis forward is set to +.
R3
0.000000 to
99999.999999
[0.000000]
Set the length of line segment connecting the stage rotation center and W
axis pi
vo
t point in the return to origin (each axis' movement amount is 0)
status.
Setting item
Setting value
[Factory default]
Description
X axis
U axis
V axis
R axis
R1
θ
1
W axis
Y axis
Rotation center
U axis pivot point in return to origin
state
XY coordinate system that
becomes parallel or vertical
to UVWR axes
R2
θ
2
V axis pivot point in return to origin
state
X axis
U axis
V axis
R axis
W axis
Y axis
XY coordinate system that
becomes parallel or vertical
to UVWR axes
Rotation center
R3
θ
3
W axis pivot point in return to
origin state
X axis
U axis
V axis
R axis
W axis
Y axis
Rotation center
XY coordinate system that
becomes parallel or vertical
to UVWR axes

 Loading...
Loading...









