Function Diagrams
Vector control
2-1288
© Siemens AG 2007 All Rights Reserved
SINAMICS S List Manual (LH1), 07/2007
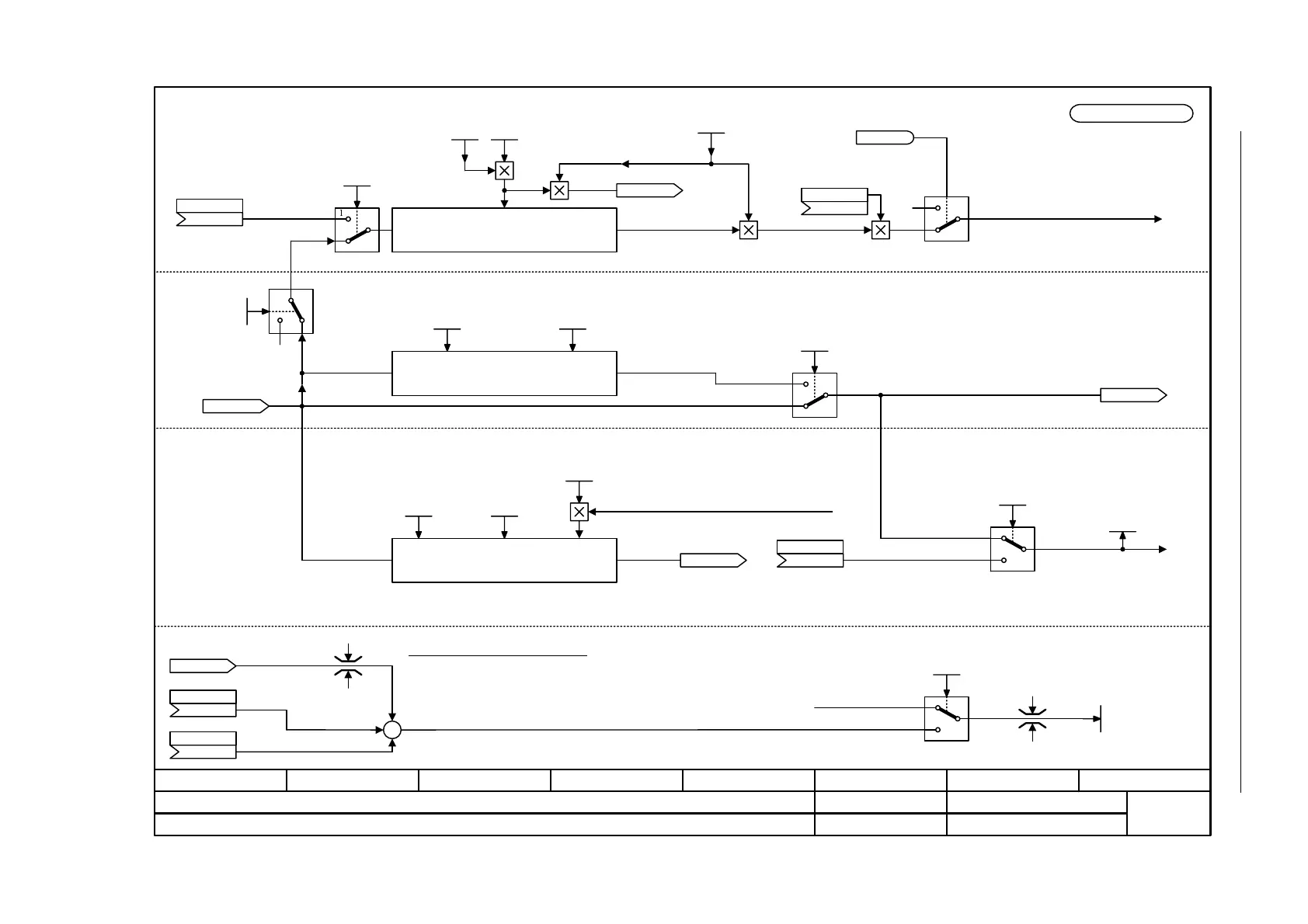
Figure 2-169 6031 – Pre-control balancing reference/acceleration model
- 6031 -
Function diagram
87654321
fp_6031_51_eng.vsd
DO: VECTOR, VECTORGL, VECTORMV
SINAMICS
21.06.07 V02.05.01
Vector control - Pre-control balancing, reference/acceleration model
Mot moment of inertia ratio
1.000...10000.000
p0342 [M] (1.000)
Mot M_inertia
0.00000...100000.00000 [kgm²]
p0341 [M] (0.00000)
a_before scaling
0.0...10 000.0 [%]
p1496 [D] (0.0)
n_set smooth
[6040.1]
<1>
Sampling time, closed-loop speed control (p0115[1])
[6030.8]
<1> p1428, p1429 only effective for p1400.2 = 1; for p1400.2 = 0 instead of p1429: p1442 or for SLVC p1452 [6040.2].
n_ctrl RefMod fn
0.00...8000.00 [Hz]
p1433[D] (0.00)
n_ctrl RefMod D
0.00...5.00
p1434[D] (1.00)
n_ctrl RefMod t_dead
0.0...2.0
p1435[D] (0.0)
(y = x for the factory setting of p1433 ... p1435)
r1436
RefMod n_set
n_ctrRefMod I_comp
(r1436)
p1437
[6040.1]
0
1
n_pre T bal
0.00...10.00 [ms]
p1429[D] (0.00)
n_pre t_dead bal n
0.0...2.0
p1428[D] (0.0)
Reference model
p1400.2 = 1
or
(p1400.3 = 0 and p1496 > 0)
Acceleration calculation
Pre-control balancing
[6490.7]
Reference model, speed setpoint I component
p1400.3
r1438
n_ctrl n_set
[6490.7]
Acceleration pre-control, source
p1400.2
Calculated accelerating torque
[6060.1]
a_prectrl dn/1s
(0)
p1495
1
0
0
1 0
0
[6490.7]
Reference model
Speed setpoint
I component
p1400.3
r1119
RFG setpt at input
n_ctrl n_set 1
p1155[C]
n_ctrl n_set 2
p1160[C]
+
n_ctrl n_set stat
r1444
0
1
Master control
p0807.0
Steady-state setpoint calculation
+
+
n_set via PC
Refer to [1020.7]
p0115[y] (Motor Modules)
xy
r1084
r1087
r1084
r1087
r0062
n_set after filter
n_set I_comp
r1439
Vdc_max contr act
r0056.14
0
0
1
[2526.6]
r1493
Mom of inert total
Mom of inert scal
(100)
p1497[C]

 Loading...
Loading...



